| 永田エンジニアリング株式会社 |
| 技術紹介/可変波形型空気動ジグ選別技術 | ||
| 可変波形型空気動ジグ選別技術 | ||
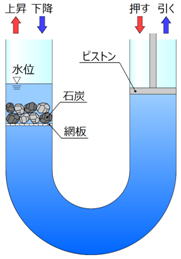
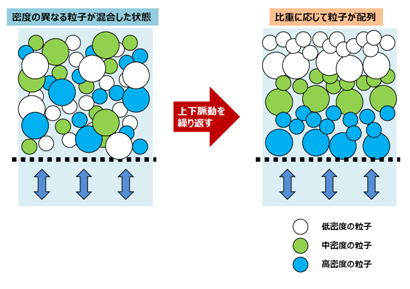
| U字管内の石炭粒子が水中に完全に浸るまで水を入れ、他方の水面をピストンで上下運動させると、石炭粒子も上下に脈動します。脈動を繰り返し行うと、比重の高い粒子は上層から下層へ徐々に移動し、一方、比重の低い粒子は下層から上層へ移動します。空気動ジグは、空気の吸排気作用によって脈動させ、比重差に基づき粒子が上下に配列・成層する原理を利用して選別する湿式の比重分離技術です。 | ||
 |
 |
|
| 永田エンジニアリング株式会社 |
| 技術紹介/可変波形型空気動ジグ選別技術 | ||
| 可変波形型空気動ジグ選別技術 | ||
| U字管内の石炭粒子が水中に完全に浸るまで水を入れ、他方の水面をピストンで上下運動させると、石炭粒子も上下に脈動します。脈動を繰り返し行うと、比重の高い粒子は上層から下層へ徐々に移動し、一方、比重の低い粒子は下層から上層へ移動します。空気動ジグは、空気の吸排気作用によって脈動させ、比重差に基づき粒子が上下に配列・成層する原理を利用して選別する湿式の比重分離技術です。 | ||
|
|
|
| 空気動ジグ選別機は、①原炭供給部、②選別成層部、③選別産物排出部の3つの機構で構成されます。 定量供給フィーダでジグ槽内へ供給された原炭は、上層から下層に、低比重粒子から高比重粒子の順に成層されます。 成層された低比重粒子(上層粒子)は樋先でオーバーフローして精炭として回収され、高比重粒子(下層粒子)は下部に水槽設置されたスターホイールで系外へ排出することで廃石として回収されます。 |
 |
|
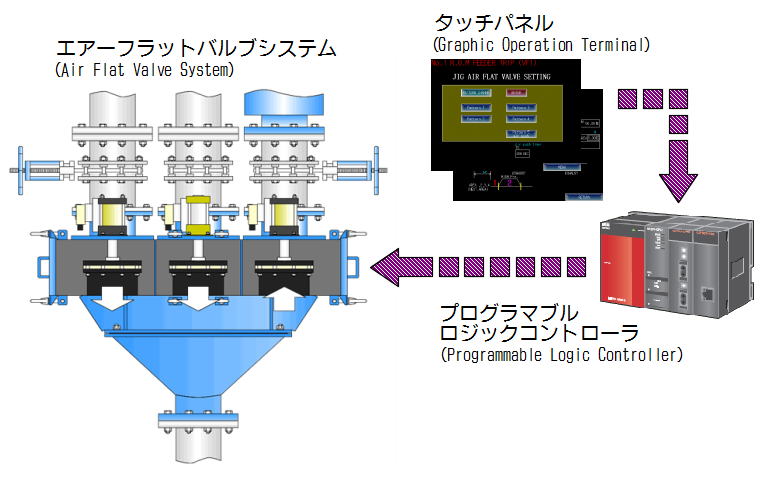
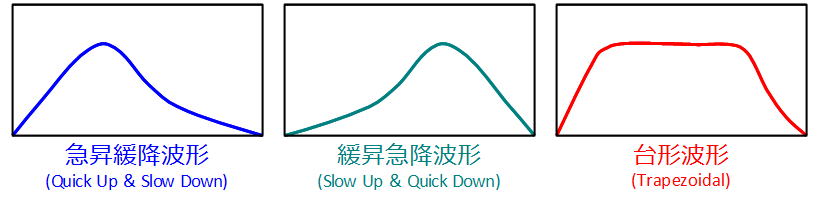
| 空気動ジグ選別の脈動波形は、選別精度を左右する重要なファクターです。これまでの研究によって、様々な波形の中で台形波形が最も選別精度が良好であることが示されています。 この台形波形を実現するために、当社は迅速かつ正確な吸排気が可能なエアフラットバルブシステムを開発しました。エアフラットバルブシステムを搭載した可変波形型空気動ジグは、従来の正弦波形から台形波形まで、あらゆる脈動波形に制御することが可能で、空気動ジグの選別性能を最大限に引き出すことができます。汎用型の空気動ジグよりも高精度かつ大容量での選別処理が要求される場面で、可変波形型空気動ジグは力を発揮します。 |
||
  |
||
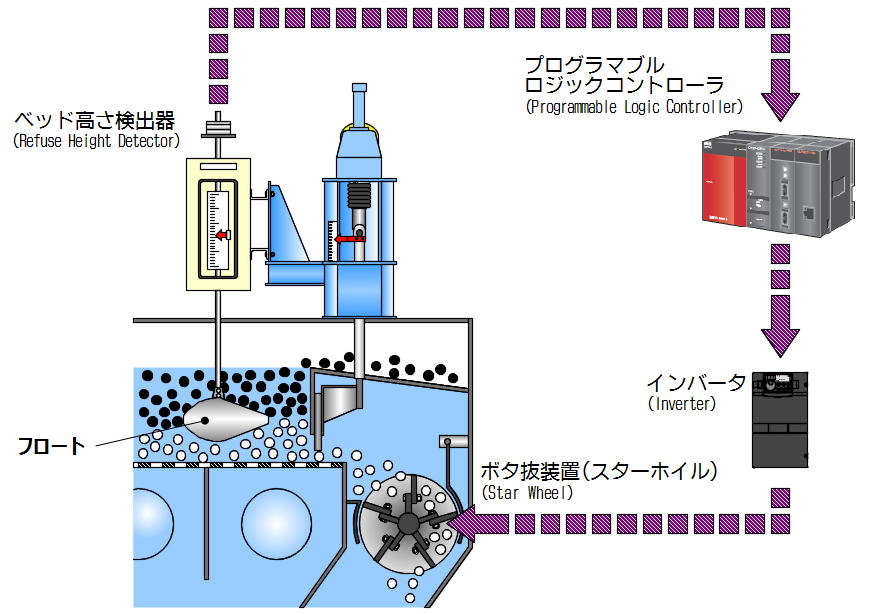
| 脈動によっていくら精度良く成層されたとしても、その成層粒子が正確に取り出されなければ、精度良く選別できたとは言えません。言い換えれば、空気動ジグ選別機で高い精度で選別するためには、脈動波形の最適化だけでなく、成層粒子を最適な分離点で上層と下層に正確に2分割して排出させることが極めて重要です。 当社では、高精度な成層粒子の排出を可能にしたスターホイール型排出システムを提案しています。成層内のフロートの比重を上下層への分離点としたい比重に設定すると、フロートの高さ位置がセンサーで検出され、その高さがスターホイールの制御装置へ送信されます。フロート位置が高くなれば、スターホイールの回転数を上げて積極的に成層粒子を排出させ、逆にフロート位置が低くなれば回転数を下げてゆっくり排出させます。このようにフロート高さに応じて回転数を制御することで、常に一定の比重で上下層へ分割し排出することができるため、精度の高い選別が可能となります。 |
||
 |
||